Work
Fun
School
About
Contact
Bryce Hansen Portfolio
Work
Fun
School
About
Contact
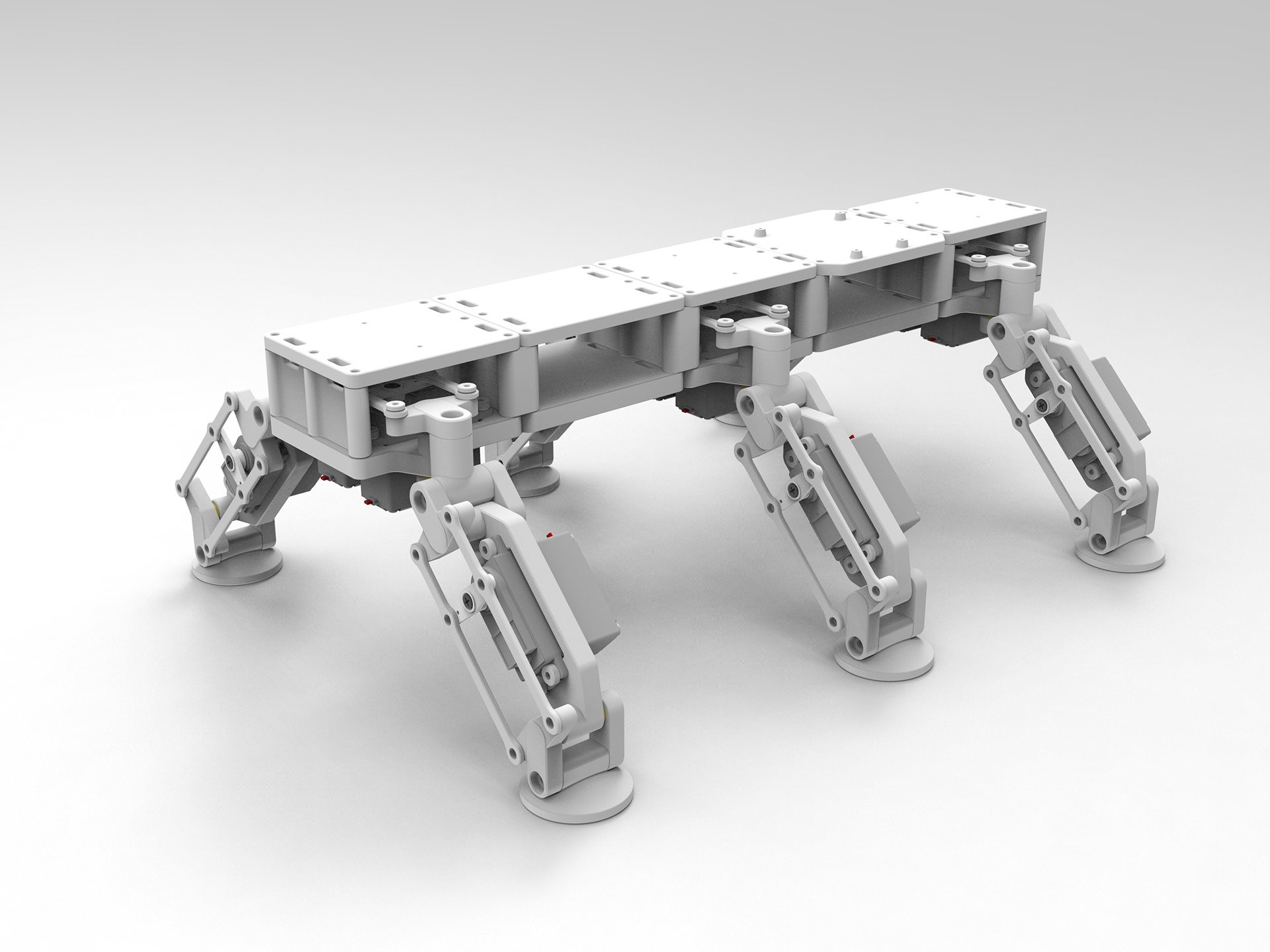
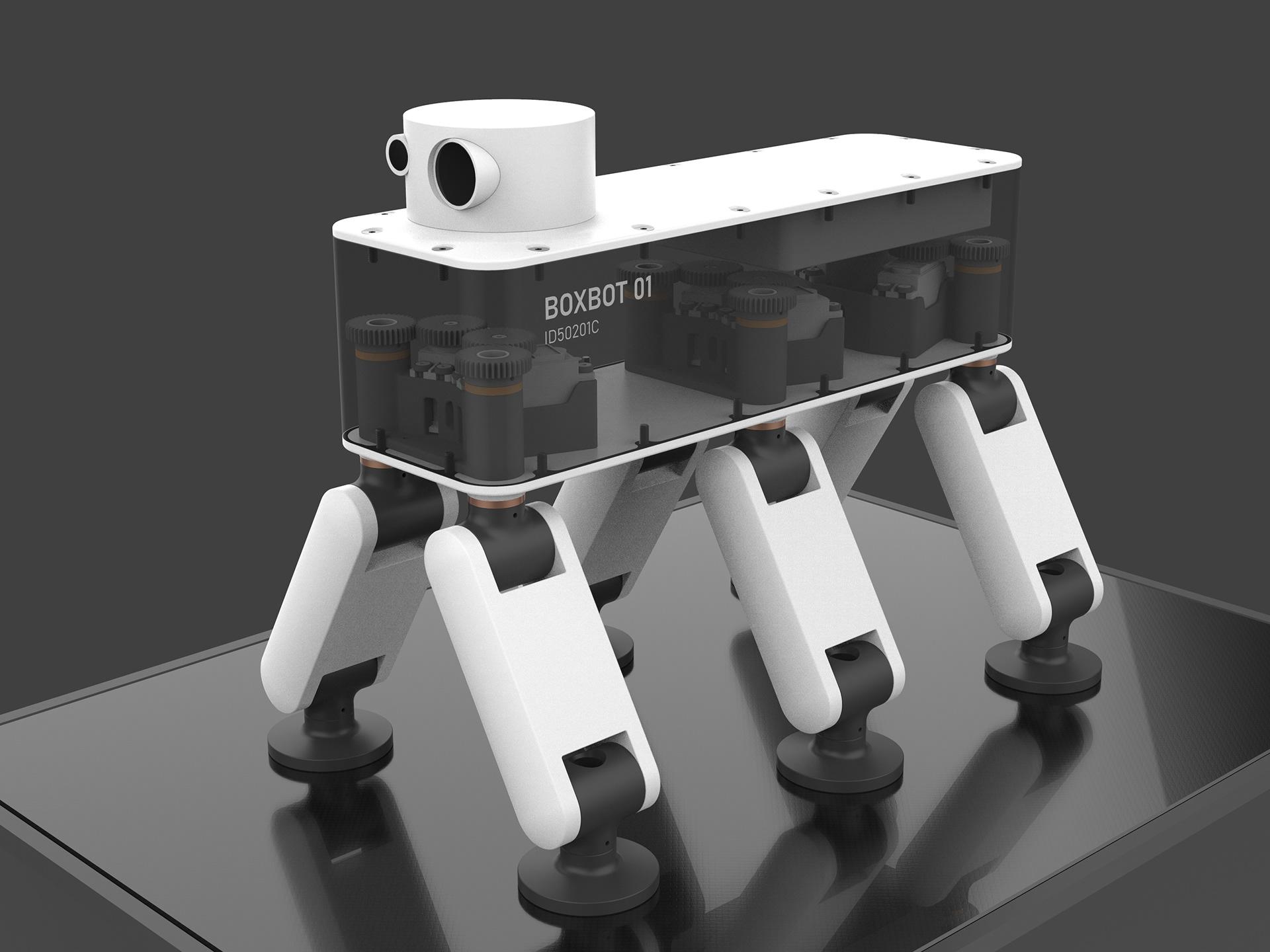
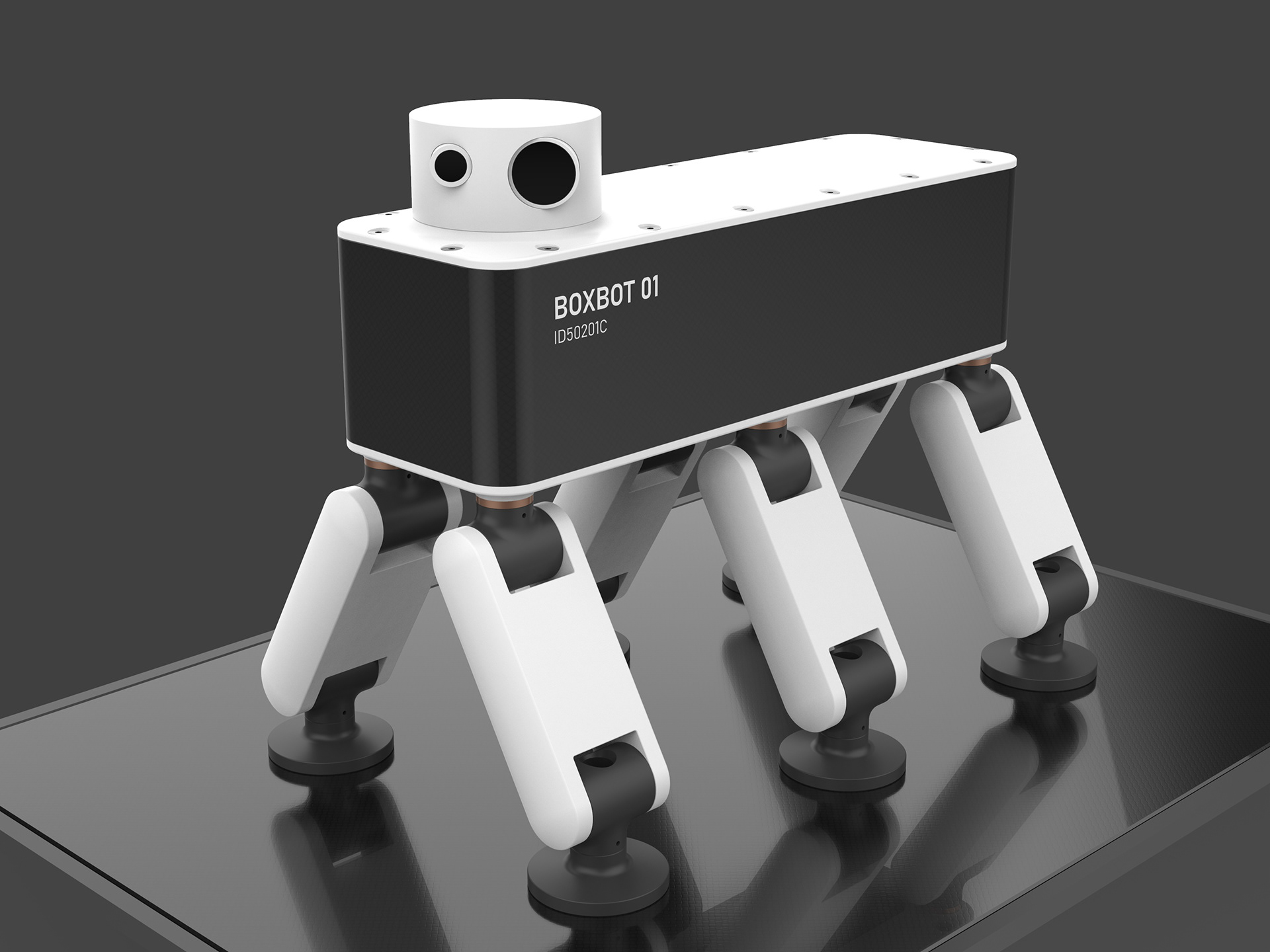
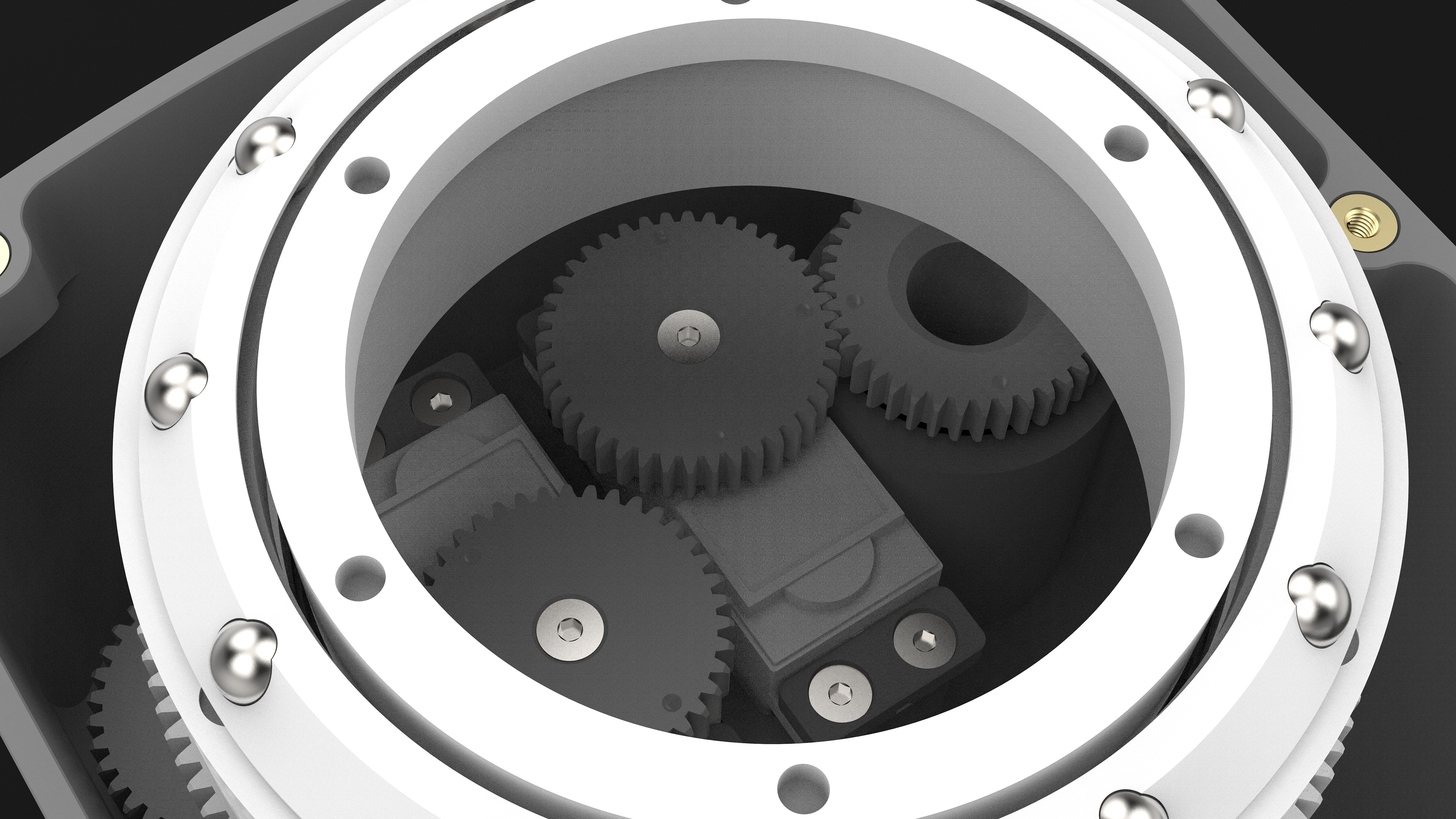
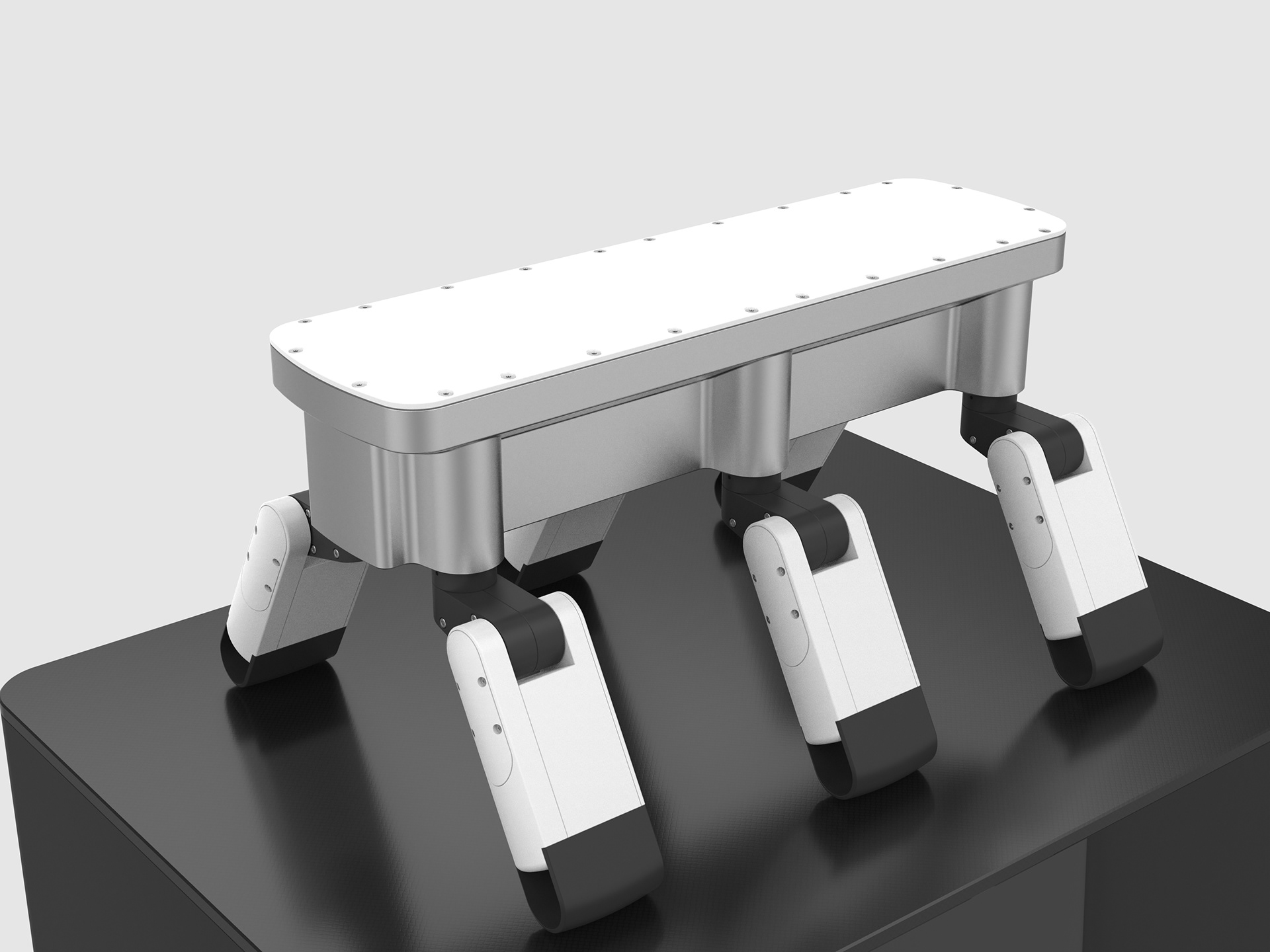
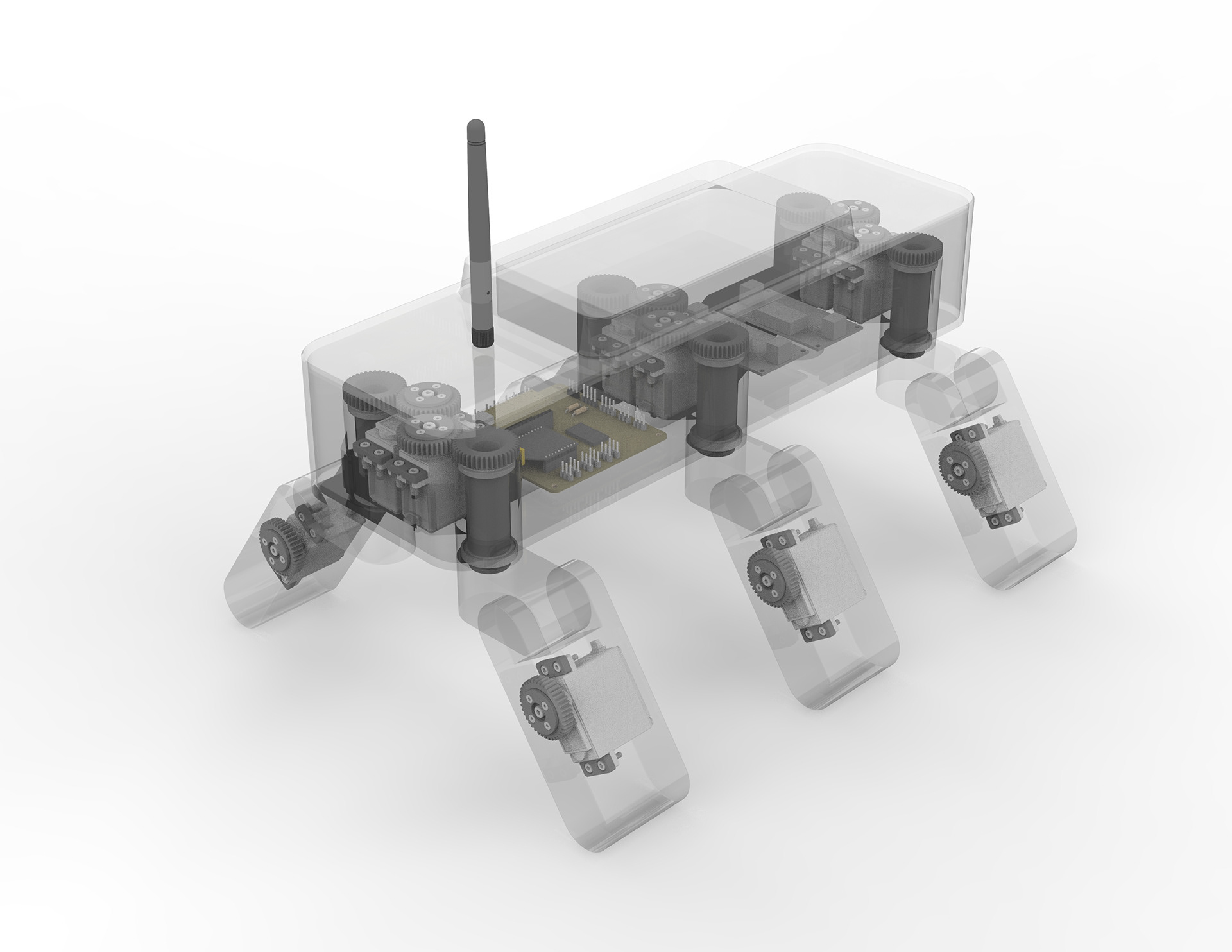
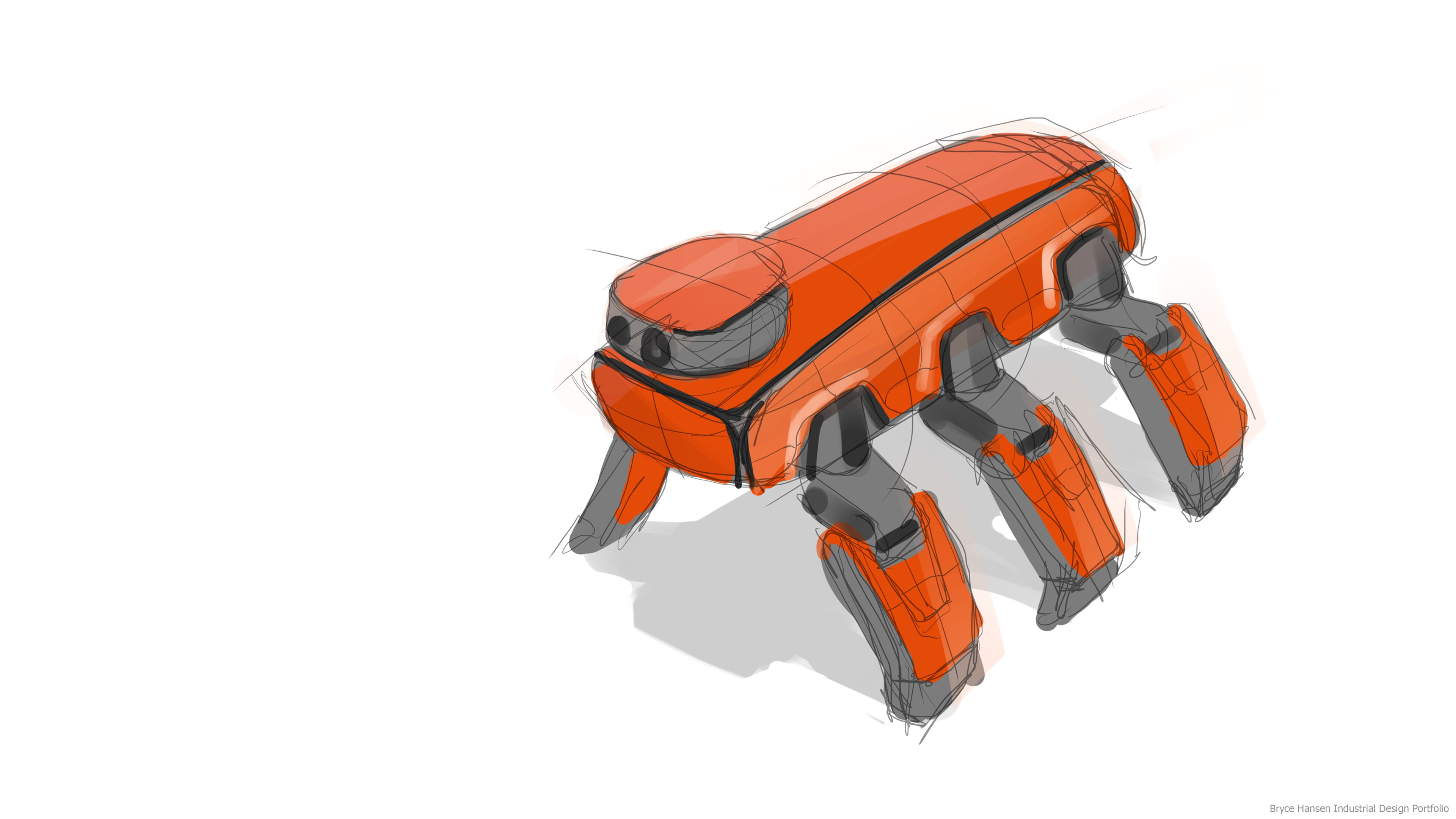
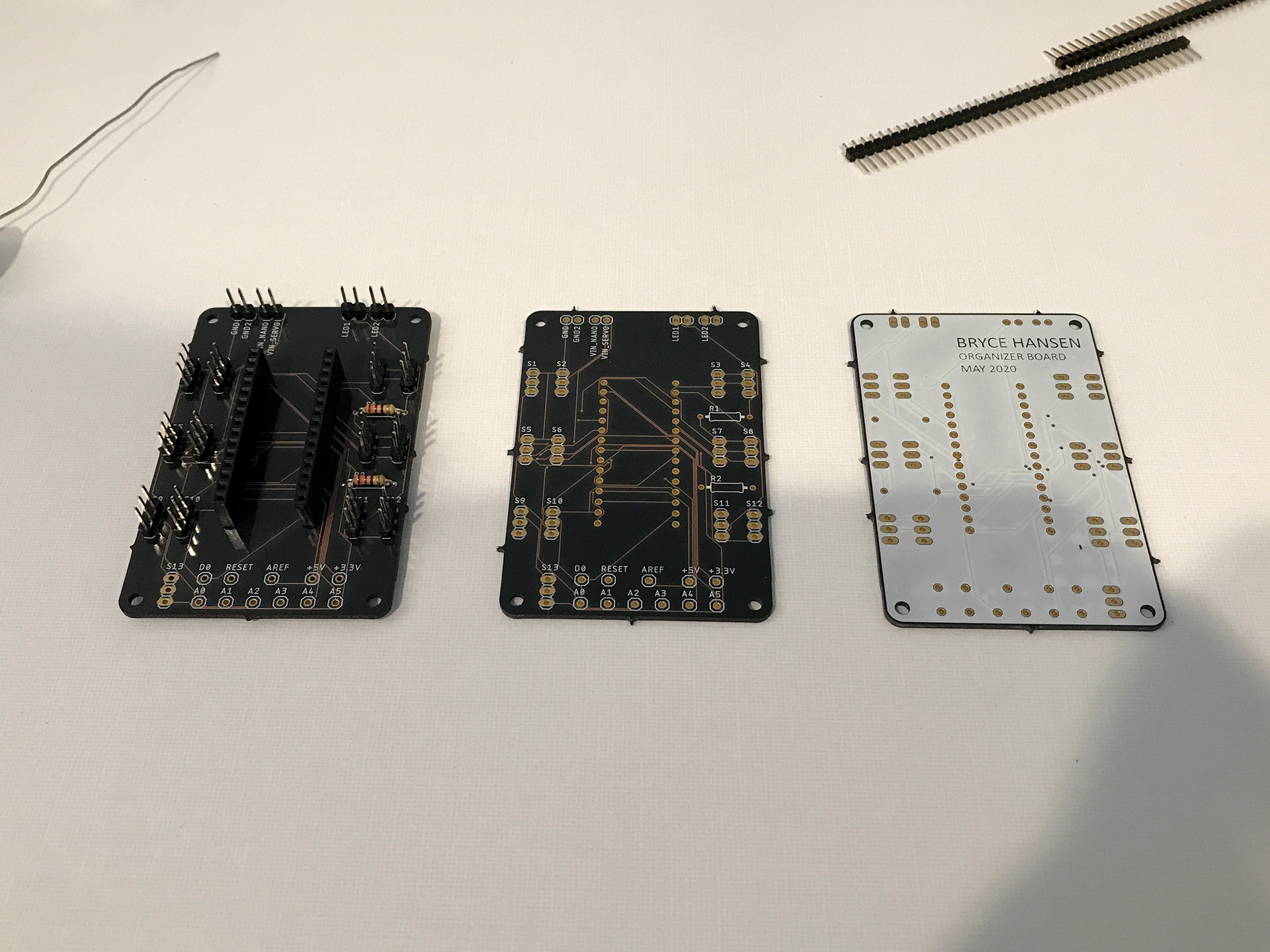
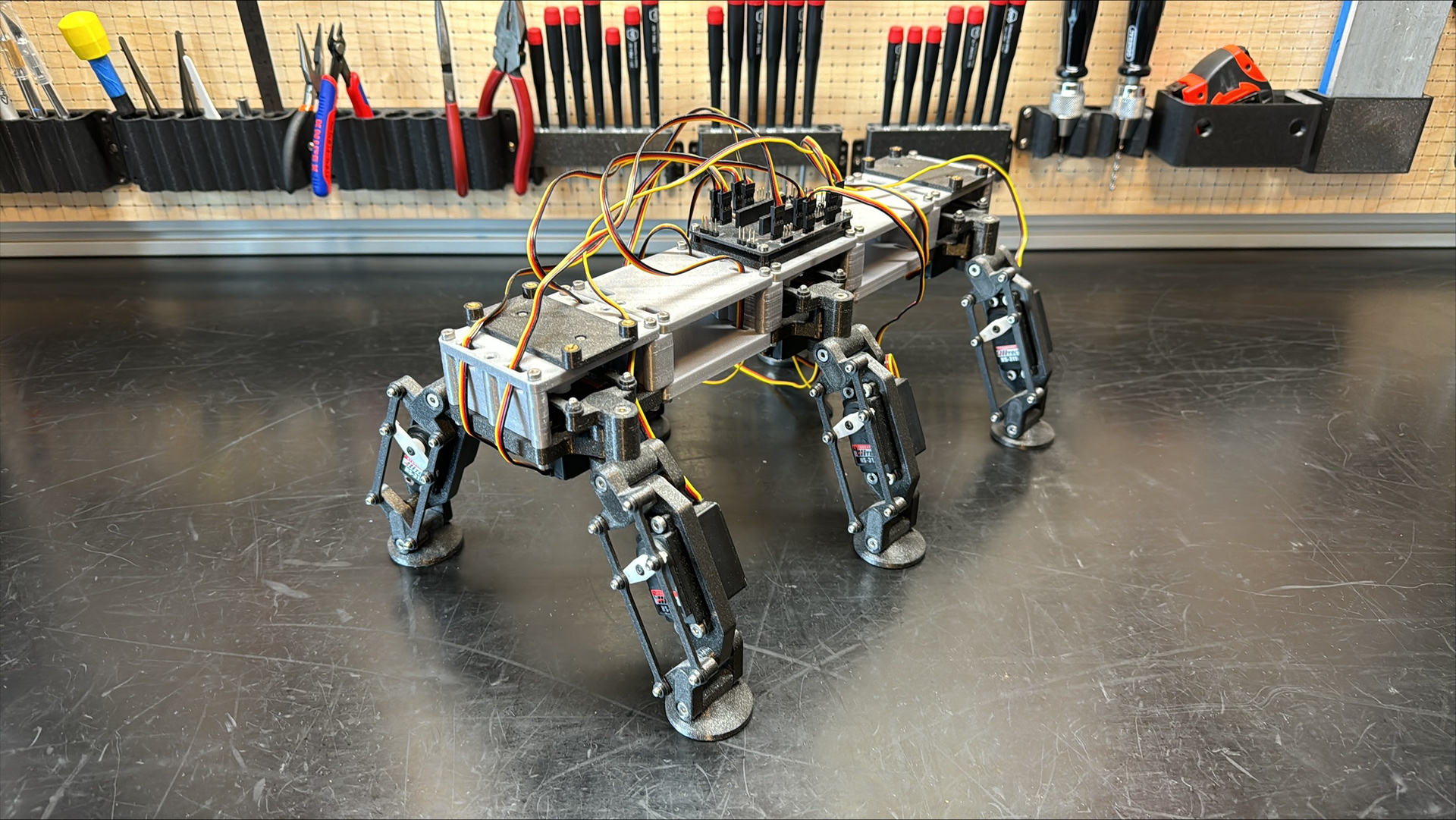
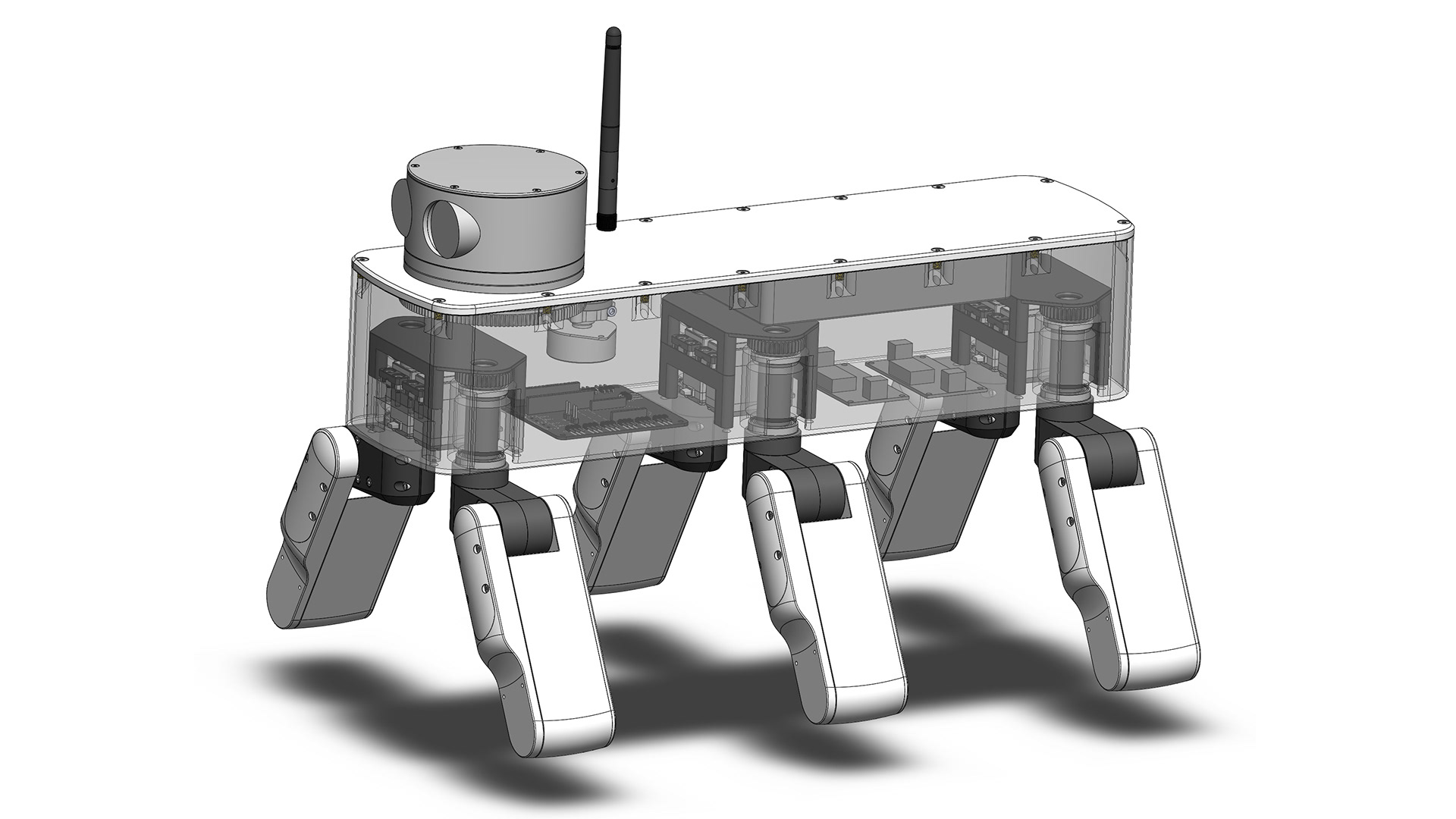
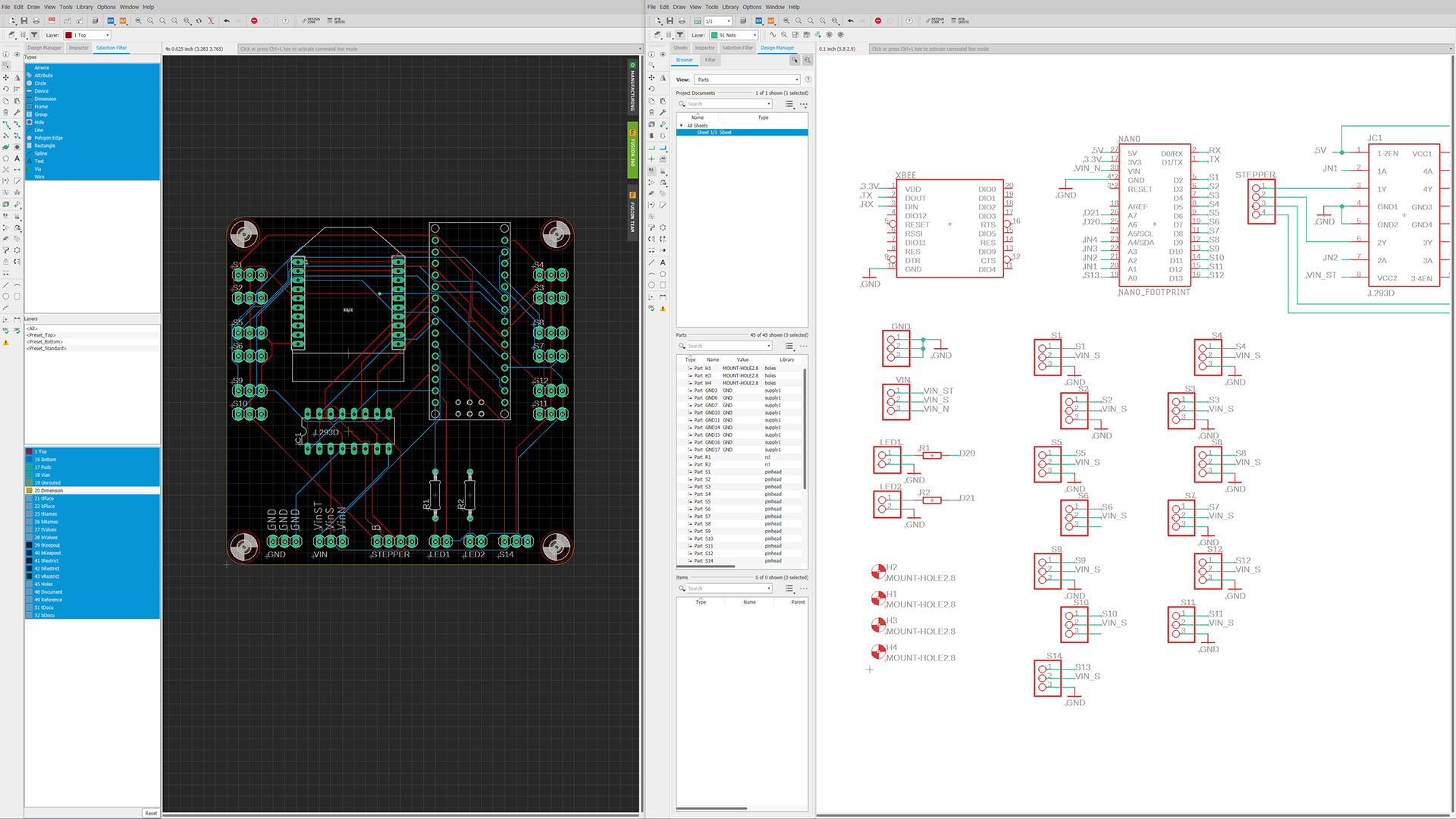
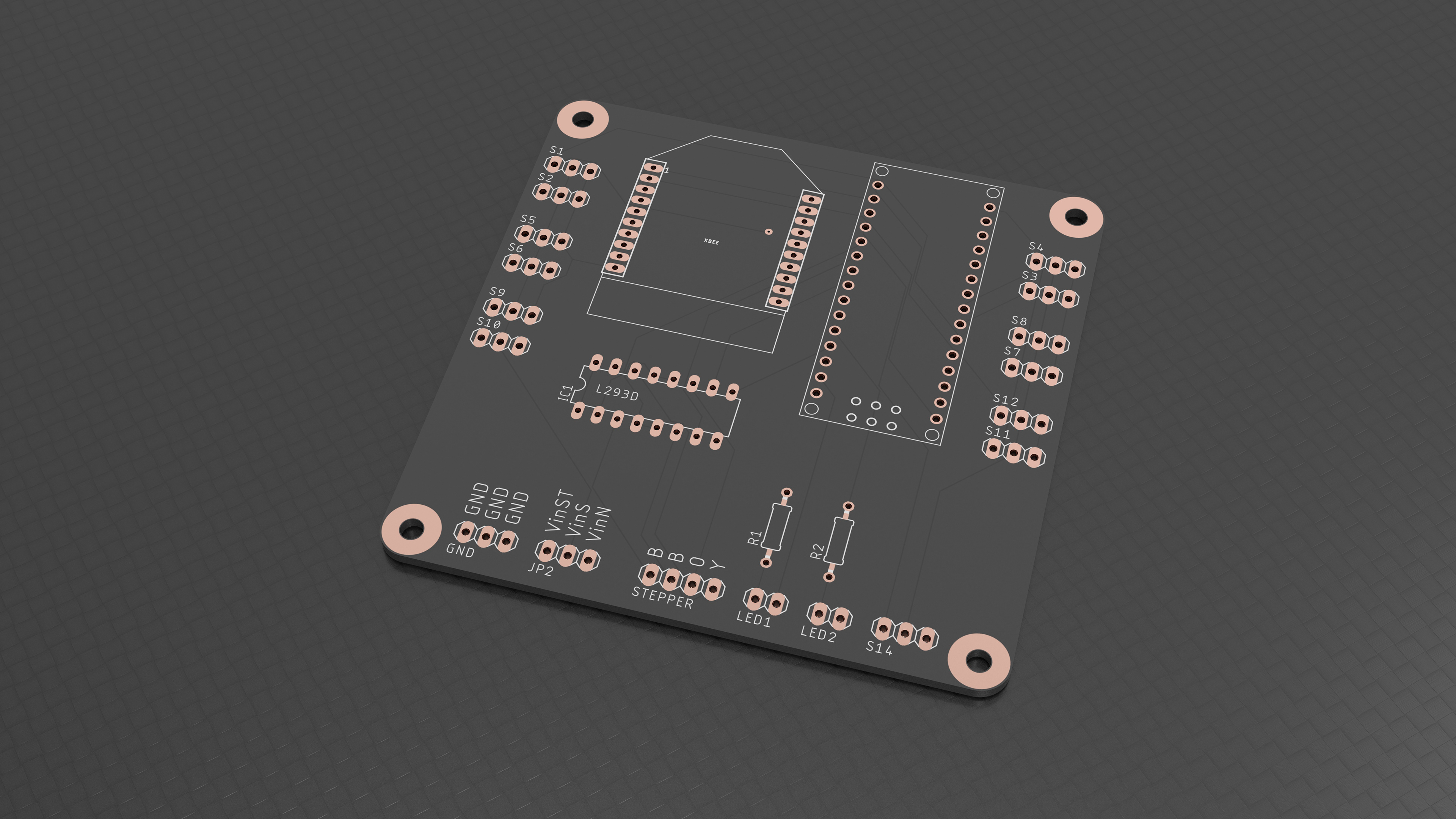
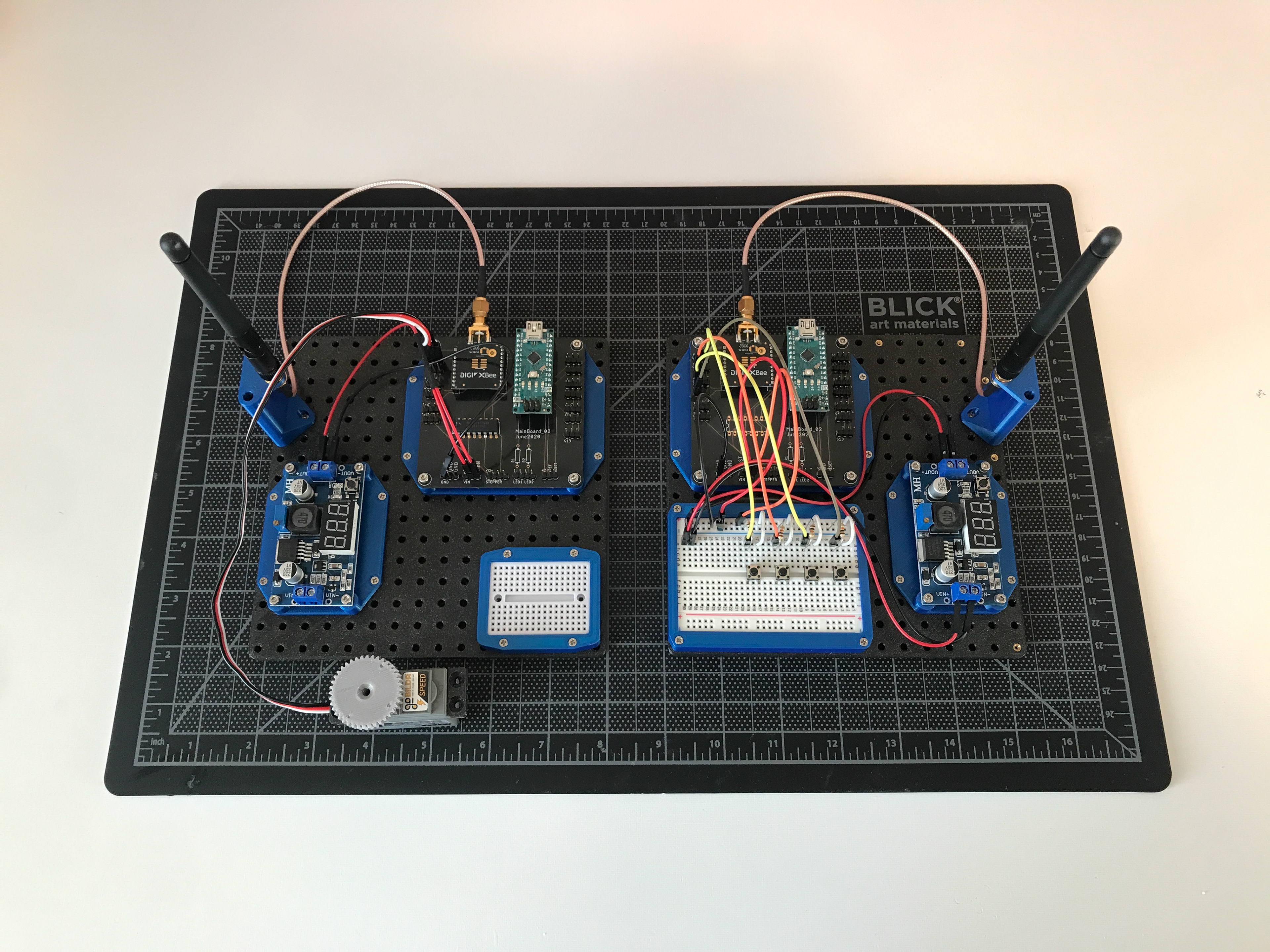
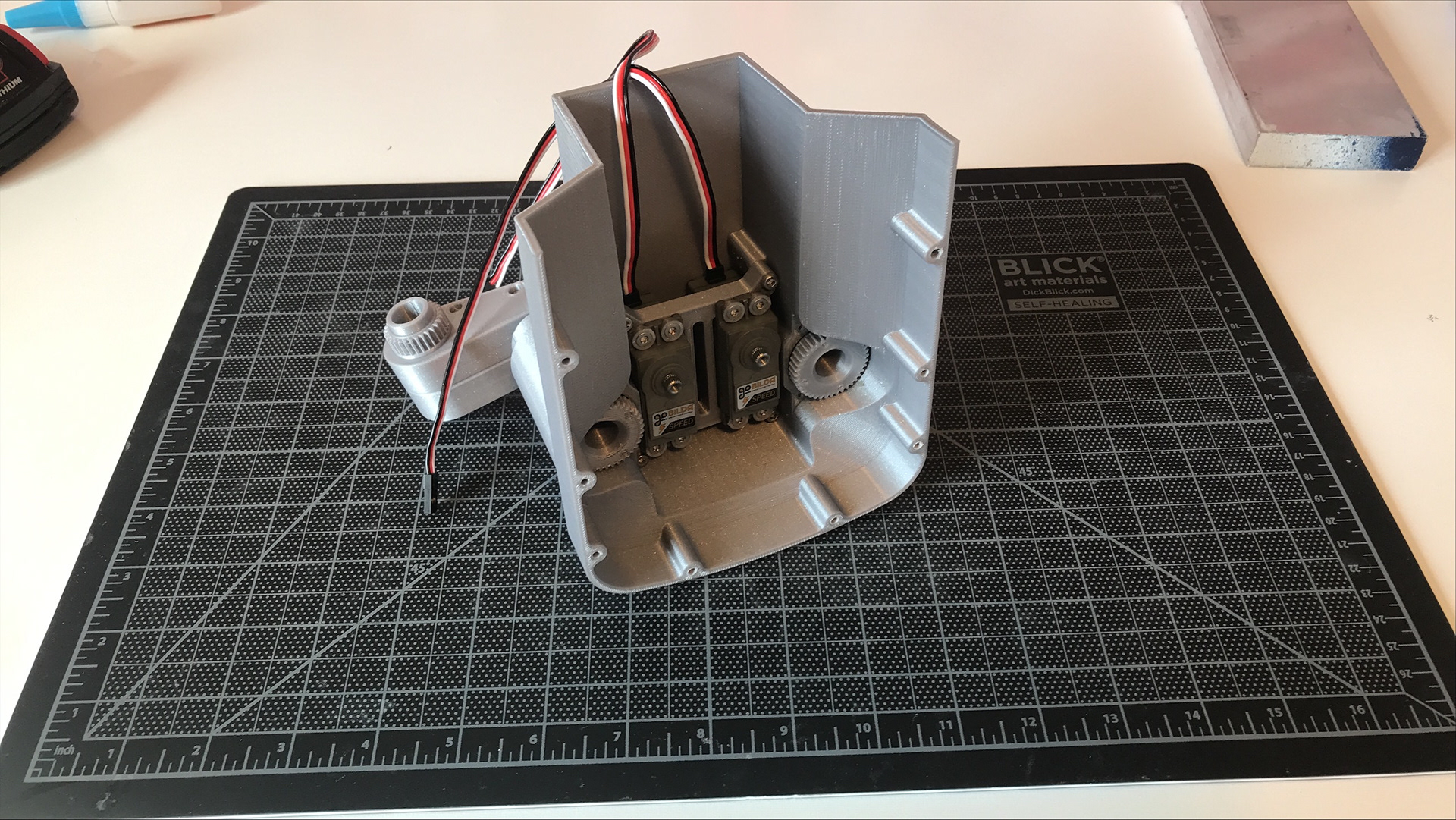
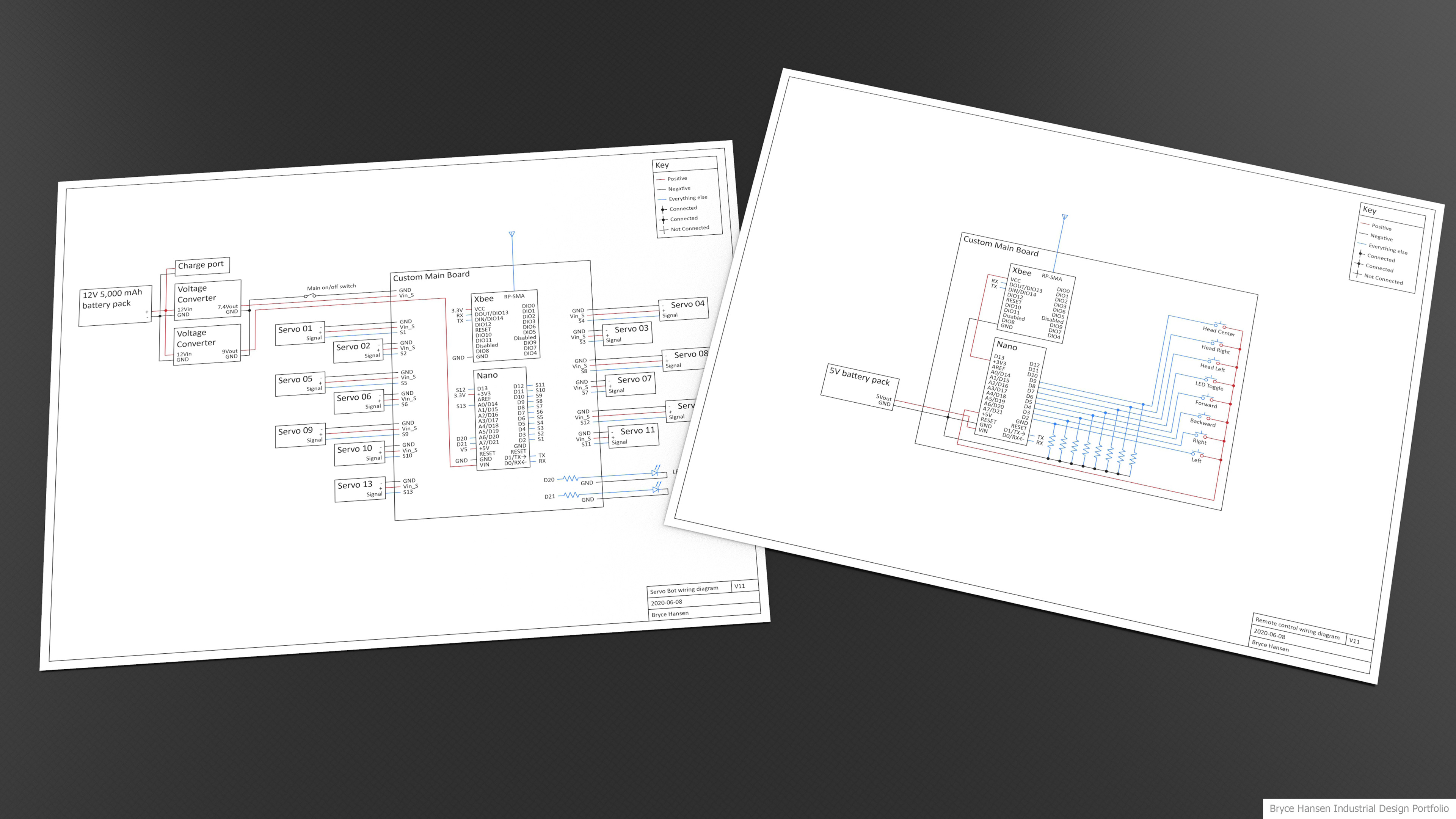
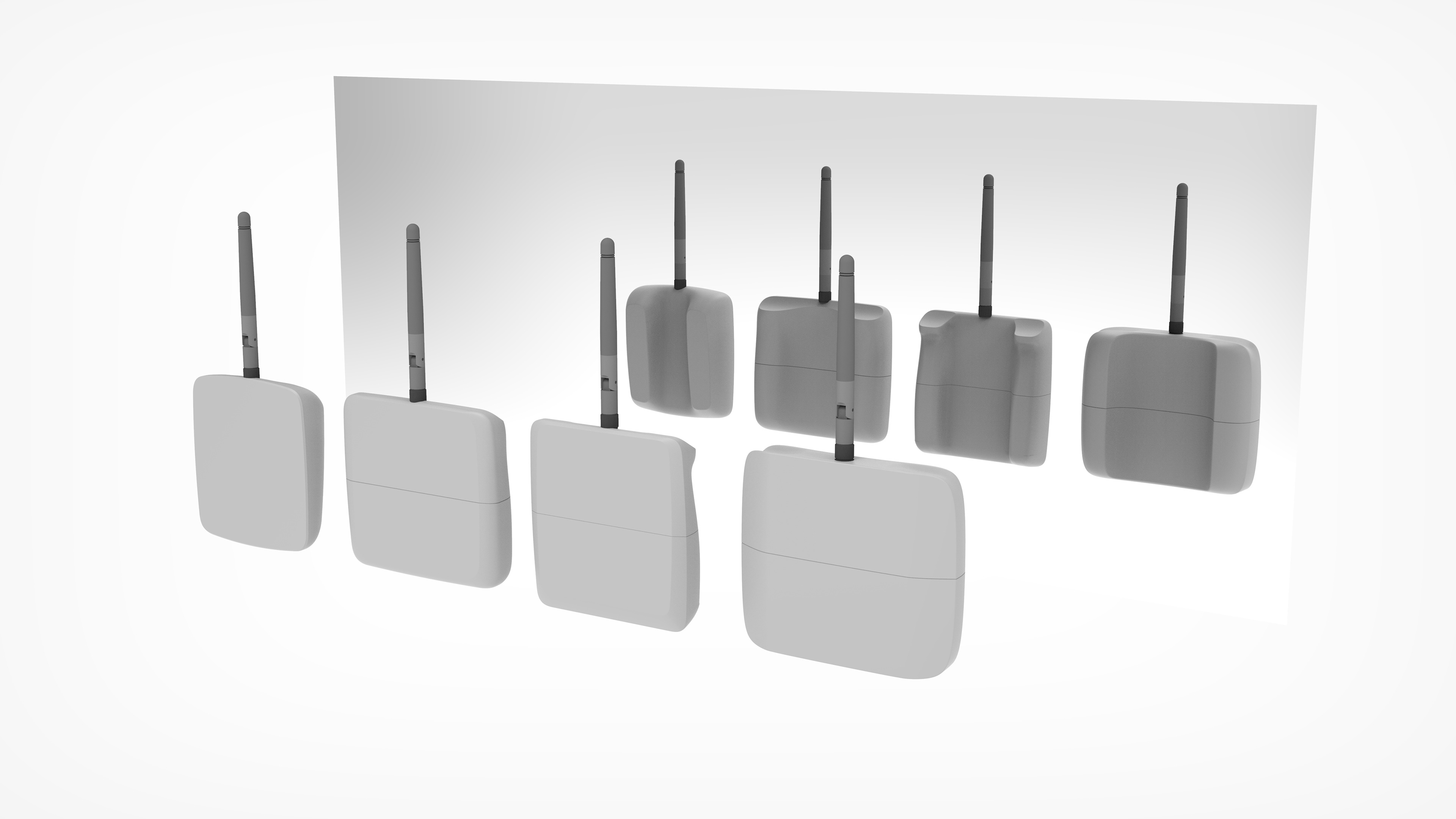
2020 - Box Bot
This was kind of an all over the place personal learning project I worked on a while back involving gears, Arduino programing, and creating some PCBs using Autodesk Eagle.
↑
Back to Top